Wheel-legged Quadruped
Motivation
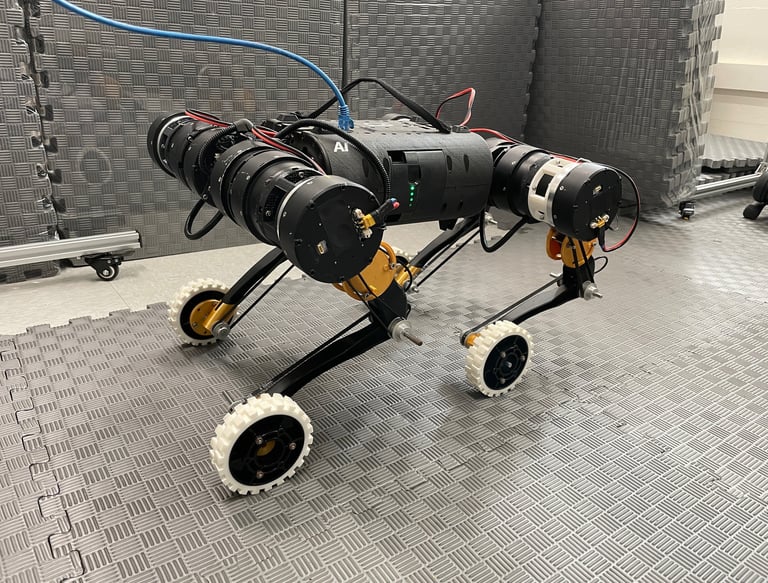
From a hardware standpoint, purely legged and purely wheeled robots each face fundamental limitations: legs offer versatility on uneven terrain but are constrained by reach, stability, and energy efficiency, while wheels provide efficient and stable motion but struggle with large discontinuities such as stairs or obstacles. Wheel-legged robots aim to combine the strengths of both by introducing rolling contact without sacrificing legged mobility. The motivation for building wheel-legged robots is to expand the range of terrains and tasks that a single hardware platform can handle, while maintaining mechanical simplicity and efficient actuation. In 2021, wheel-legged quadruped platforms were not commercially available, making custom hardware development a necessary step toward exploring this design space.

Hardware Design
Due to limitations of the Unitree A1’s low-level control architecture, all twelve motors must remain connected for the onboard power distribution and control boards to function correctly. As a result, the original roll joint motor was repurposed to drive the wheel, allowing the existing electronics and power system to be retained without modification.
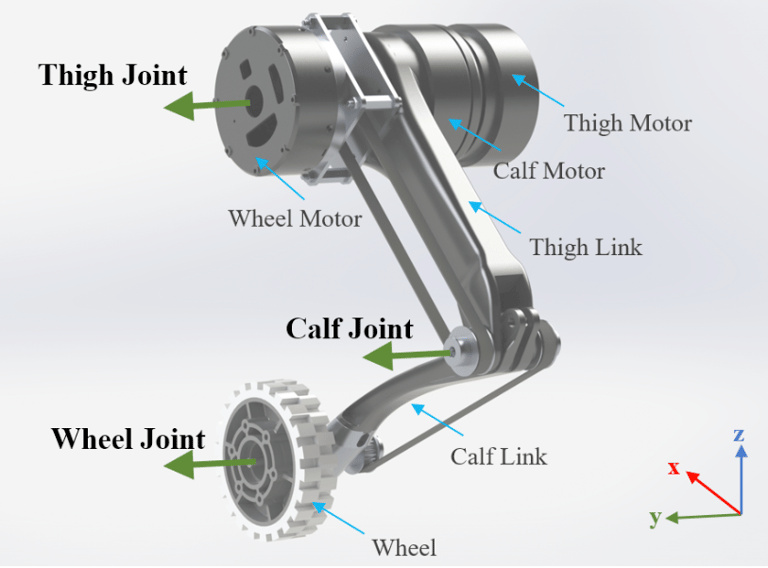
To minimize added leg inertia and remain consistent with our control assumptions, the wheel motor was integrated coaxially with the existing thigh and calf motor assembly using laser-cut mounting plates and off-the-shelf standoffs. Power is transmitted to the wheel through a compact two-stage pulley system, enabling flexible gear ratio selection while maintaining a lightweight design. The wheel axle mount was designed as a direct replacement for the A1’s rubber foot, preserving the original bolt pattern and allowing straightforward installation without permanent modification to the leg structure.
Robots in-motion




Contact
Reach out for internships or collaborations
Phone
junchaom@usc.edu
+1-507-269-9963
© 2025. All rights reserved.