Hector V1 Biped
Motivation
After successfully converting a commercial quadruped into a wheel-legged research platform, I gained a deep understanding of the practical constraints of the Unitree A1, including its wiring, low-level software stack, and mechanical design. When this project began in 2022, humanoid robots were both scarce and prohibitively expensive, making them difficult to modify, repair, or experiment on. To enable systematic hardware-in-the-loop research on dynamic bipedal locomotion and loco-manipulation, a low-cost, maintainable, and accessible humanoid platform was needed. Hector V1 was therefore conceived by repurposing the Unitree A1 ecosystem and designing a pair of custom bipedal legs, creating a practical humanoid testbed that bridges the gap between commercial quadrupeds and high-end humanoid robots.


Hardware Design
Hector V1 was designed as a practical humanoid research platform that prioritizes accessibility, maintainability, and rapid iteration over mechanical complexity. Rather than pursuing a clean-sheet humanoid design, the platform deliberately builds upon the Unitree A1 ecosystem, reusing its onboard electronics, power distribution, sensing, and software stack. This system-level reuse significantly reduced development time while providing a reliable and well-understood hardware foundation for experimentation.
Joint Actuation
A key design objective of Hector V1 was to achieve sufficient torque and bandwidth for dynamic bipedal locomotion while retaining mechanical simplicity. To this end, the platform adopts a direct motor actuation strategy derived from the Unitree A1, enabling tight integration with existing low-level controllers and power electronics. This choice avoids the complexity and maintenance overhead associated with high-ratio gearboxes or custom actuators, while still providing the responsiveness required for balancing and walking behaviors.
The actuation layout was selected to support whole-body control and rapid prototyping, allowing control algorithms to be deployed and iterated without extensive hardware modification. By aligning actuator selection with available firmware and control infrastructure, Hector V1 maintains a strong coupling between mechanical design and control feasibility.


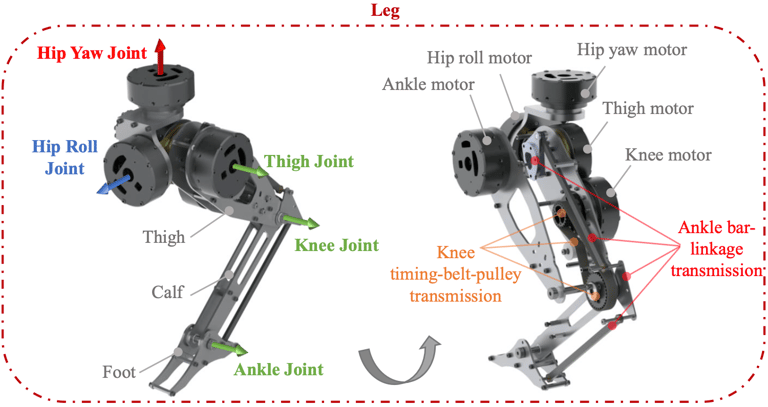
Hybrid Transmission System
To balance torque amplification, backdrivability, and mechanical robustness, Hector V1 employs a hybrid transmission strategy that combines belt-driven and direct-drive elements across different joints. Belt transmissions are used where torque scaling and flexibility are beneficial, while more direct transmission paths are retained for joints that demand high bandwidth and precise control.
This hybrid approach provides several advantages: it reduces reflected inertia, improves impact tolerance during foot-ground interactions, and allows transmission ratios to be tuned without redesigning the entire actuator assembly. Importantly, the transmission system was designed with modularity in mind, enabling components to be replaced or adjusted as control requirements evolve.


Robots in-motion


Contact
Reach out for internships or collaborations
Phone
junchaom@usc.edu
+1-507-269-9963
© 2025. All rights reserved.